车载视觉
车载视觉指的是在汽车中应用机器视觉传感器来替代人眼的视觉,其是结合了光学、计算机技术等知识以及车辆运动的特点而形成的,是无人驾驶技术的发展重点,但车载视觉易受到如下因素影响:(1)天气变化。天气变化主要影响光线强度变化状况。光线直射,会引起摄像机过度曝光;光线过暗,会影响摄像机曝光不足。这会使摄像机图像中产生无纹理的高光和低光区域。(2)车辆速度变化。一般来说车辆速度与画面质量成反比。速度较慢时,图像接近静止图片,质量较好;速度较快时,受相机拍摄帧数的限制,会在原始图像中产生模糊区域。(3)车辆运动轨迹。一般来说车辆运动轨迹分为直线和曲线两种。当在直线位置时,相机前后帧当中特征匹配重叠率较高,相机水平面基本与地面平行;当在曲线位置时,相机与地面有侧倾角,使相机水平面侧倾于水平地面,从而降低匹配重叠率。(4)相机安装位置。安装位置分为车内和车外,车内和车外的主要区别在于玻璃反射率和车内阴影的影响。还有一个重要因素是俯仰角的区别,相机俯仰角越朝下,对照度越敏感,越容易出现曝光或曝光不足。相机安装越平行于路面,由于视觉图像中像素精度和距离成反比,图像算法的精度就越低,故安装位置的不同对后期算法开发有重要影响。(5)随机扰动。随机扰动包括轮胎与地面的摩擦系数、路面的凹凸等情况,这些随机扰动都会使运动图像产生模糊,进而影响车辆行驶监测效果。
-
嵌入式视觉:规模化部署与多模态技术进步正驱动产业变革
2025-05-13

-
嵌入式视觉系统所需的高速数据传输
2025-05-08

-
飞凌微推出AIoT应用系列高性能端侧视觉AI SoC芯片A1
2025-03-07

-
大联大友尚集团推出基于onsemi产品的6.6kW车载电动汽车充电器方案
2025-02-06

-
车载 GaN 功率器件进入发展拐点!
2024-12-31

-
4轮融资签订4次对赌协议,弘景光电凭借车载摄像头要上市了
2024-11-27
-
研华合作Innodisk 以AFE-R360MIPI摄像头模块解锁AMR视觉功能
2024-11-20

-
利用运动唤醒功能优化视觉系统的功耗
2024-11-06

-
Vishay面向车载以太网推出超小型高可靠性ESD保护二极管
2024-10-16
-
东芝推出面向车载直流有刷电机的新款栅极驱动器IC,助力缩小设备尺寸
2024-09-10

-
设计车载充电器的关键考虑因素
2024-09-10

-
【展商推荐】光鉴科技:专注于智能视觉感知技术的研发与应用
2024-08-22

-
研华AFE机器人专用控制器:集多视觉与强抗干扰的机器人"大脑"
2024-07-22

-
清华团队研制出世界首款类脑互补视觉芯片
2024-06-04

-
大联大友尚集团推出基于NuVolta产品的车载无线快充方案
2024-06-04

-
面向现代视觉系统的低功耗图像传感器
2024-05-28

-
DU562音频处理芯片—车载娱乐设备音响解决方案
2024-05-09

-
车载以太网交换芯片玩家 TOP 10
2024-03-27

-
车载导航触摸屏中应用的触摸感应芯片
2024-03-25

-
小米CyberDog采用银牛3D视觉感知方案
2024-03-21

-
逐点半导体与网易《逆水寒》手游就移动端视觉处理优化达成合作
2024-03-18
-
CMOS 图像传感器为自动驾驶汽车提供视觉感知
2024-02-26

-
车载UVC杀菌灯中应用的紫外线杀菌灯珠
2024-02-05

-
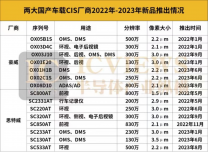
赋能自动驾驶,车载CIS芯片在爆发的前夜
2023-12-19
-
应用案例 | 三维线激光扫描仪,车载ABS泵圆柱件段差&位置度检测
2023-10-19

-
车载DSP:新应用孕育国产“芯”机遇
2023-10-19

-
开辟全新战场 !高通正式官宣:将为奔驰宝马提供车载芯片
2023-09-06

-
焕然升级 | 全新3D线激光视觉取图软件,带来前所未有的体验!
2023-08-11
-
安谋科技牵头发布《车载智能计算芯片白皮书》,洞见智驾智舱“芯”趋势
2023-07-06

-

-
是德科技携手温莎大学进行车载网络安全培训
2023-06-26

-
Arm推出全新智能视觉参考设计:将服务于中国市场
2023-06-20
-
逐点半导体视觉显示技术为《晶核》带来丝滑稳定的120帧手游体验
2023-05-09
-
欧盟前沿性NimbleAI项目采用定制RISC-V处理器来支持神经形态视觉与3D集成芯片
2023-04-28
-
思特威全新推出两颗高帧率面阵CMOS图像传感器新品,赋能主流工业机器视觉应用
2023-04-21
-
湾测 WONSOR 三维线激光扫描仪 |车载ABS泵圆柱件段差&位置度检测
2023-04-19

-
Nexperia推出适用于24 V电源系统的车载网络ESD保护产品组合
2023-03-06
-
贸泽备货ams OSRAM Mira220全局快门图像传感器 满足多种机器视觉应用需求
2023-02-27
-
逐点半导体为真我 GT Neo5的强劲视觉显示性能注入澎湃动力
2023-02-09