3.双驱电动车控制系统硬件设计
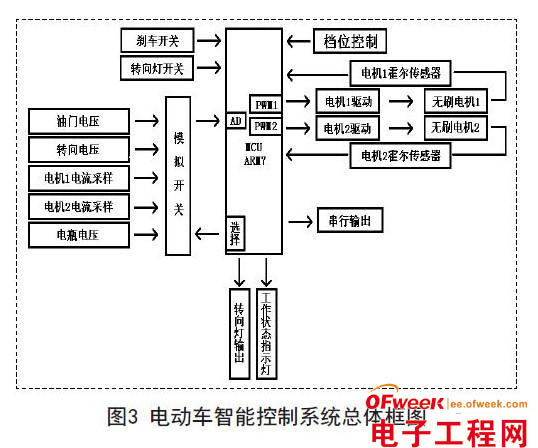
本论文控制系统设计思想是利用一个CPU控制两个无刷直流电动机,是为实现电动汽车的后轮分别独立驱动而设计的.在电动汽车控制系统中,控制系统主要负责对两个无刷直流电机的电机速度调节.正反转控制,开始和停止控制等功能.这里采用PHILIPS公司LPC2100系列中的LPC2132作为中央处理器.
LPC2132是基于一个支持实时仿真和跟踪的32位ARM7TDMI-STMCPU的微控制器,内嵌高速64K字节Flash存储器,其宽范围的串行通信接口和丰富的片内资源(如32位定时器x4个.PWM通道x6个.10位8路ADC和10位DAC,另外具有47个通用I/O口以及9个边沿或电平触发的外部中断源)使其具有强大的处理功能,并具有很强的抗干扰能力,特别适用于工业控制.电动车智能控制系统总体框图如图3所示,下面给出几部分功能的硬件设计图.
3.1 电源设计
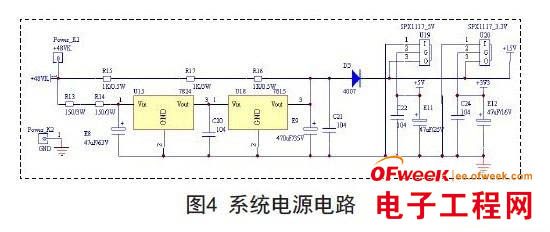
本控制系统的电源由4块12V大容量铅蓄电池串连后提供48V直流电,而系统中的工作电压还有+3.3V.+5V和+15V,因此采用常用的稳压电源芯片LM7824.LM7815.1117-3.3和1117-5产生所需各组电压,具有可靠.稳定.简单的特点.如图4所示.